Background
Box dimension is a measure of the structural complexity of an object. It is grounded in theoretical fractal analysis and is applied here to three-dimensional point cloud data. This method uses box counting (or more appropriately voxel counting), where the relationship between the total number of boxes needed to contain the point cloud and the box size is the structural complexity of the point cloud. Box dimension is the slope of a simple linear equation between the log of the number of boxes, and the log of the inverse box size. A larger R-squared value indicates more self similarity in the point cloud.
Box dimension ranges from 1 (a line) to 3 (a solid cube). A box dimension of 2.72 is a special object known as the Menger sponge, which has both zero volume and an infinite surface area. Most individual trees have a box dimension between 1 and 2.2.
Box dimension is sensitive to the resolution and level of occlusion in the point cloud. Too low of a resolution can lead to oversimplification, and too much occlusion can lead to too few boxes being used to contain the cloud as box size decreases. A good quality point cloud with low occlusion and a resolution between 0-1 cm is optimal for calculating box dimension.
Installation
You can install the package directly from CRAN:
install.packages("rTwig")Or the latest development version from GitHub:
devtools::install_github("https://github.com/aidanmorales/rTwig")Load Point Cloud
Now we need to load a point cloud. Box dimension can run on any point cloud, from single trees, to entire forest stands. Let’s use our example Kentucky coffee tree.
file <- system.file("extdata/cloud.txt", package = "rTwig")
cloud <- read.table(file, header = FALSE)Box Dimension
Now we can calculate the box dimension of our point cloud with the
box_dimension() function. We need to specify the location
of the x, y, and z coordinates, but it defaults to the first three
columns in the point cloud data frame. We can also set the lower cutoff,
or the smallest box size. Since our point cloud resolution is 1 cm, we
set the lowercutoff parameter to 0.01 m, which is also the
default. Let’s take a look at the summary data and extract the box
dimension (slope).
# Box Dimension Summary
output <- box_dimension(cloud)
str(output)
#> List of 2
#> $ :Classes 'tidytable', 'tbl', 'data.table' and 'data.frame': 9 obs. of 2 variables:
#> ..$ log.box.size: num [1:9] 0 0.693 1.386 2.079 2.773 ...
#> ..$ log.voxels : num [1:9] 1.1 1.95 3.09 4.11 5.18 ...
#> ..- attr(*, ".internal.selfref")=<pointer: 0x559a58d07f00>
#> $ :Classes 'tidytable', 'tbl', 'data.table' and 'data.frame': 1 obs. of 4 variables:
#> ..$ r.squared : num 1
#> ..$ adj.r.squared: num 1
#> ..$ intercept : num 1.02
#> ..$ slope : num 1.48
# Box Dimension (slope)
output[[2]]$slope
#> [1] 1.483312Visualization
We can also plot the results as both 2D and 3D plots, by setting the
plot parameter to 2D, 3D or
ALL. The plot parameter is set to
FALSE by default to speed up the calculations.
# 2D Plot
output <- box_dimension(cloud, plot = "2D")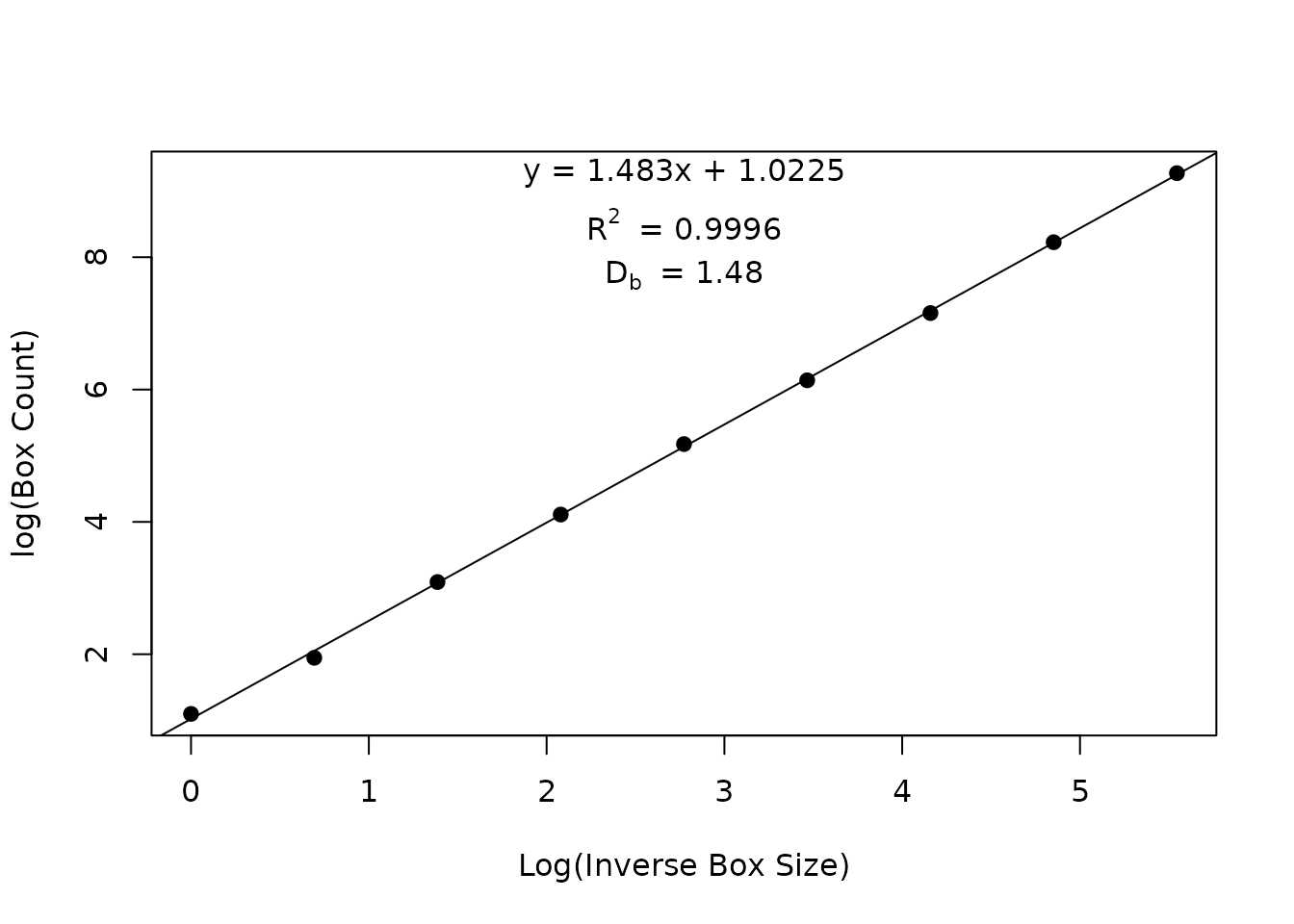
# 3D Plot
output <- box_dimension(cloud, plot = "3D")